Abstract
The negative impact of atmospheric pollutants emitted by mobile vehicles on human health and environment have been increasingly attracting the attention of public and private policy makers. Those entities and many other have been working together to ensure that emissions related to the consumption of fossil fuels are considerably minimize. One of the main authors of this problem seems to be the means of displacement we are using every day, thermal cars. It is therefore necessary to explore and develop more economical approaches and modern alternatives for vehicle energy consumption. It is within this framework that automobile manufacturers, in collaboration with researchers, are committed to developing new forms of transport, the most ideal of which are electric vehicles and hybrid electric vehicles. This paper discusses the modeling and optimization of energy management of hybrid electric vehicles. The article develops an energy management system to minimize the energy consumption of a hybrid electric vehicle. Hybrid electric vehicle control is managed by the Adaptive Equivalent Consumption Minimization Strategy (A_ECMS). This strategy performs an update of the equivalence factor through the battery state of charge feedback method. The simulation results shown that the A_ECMS approach achieved an average fuel saving of nearly 40% for FTP-75 driving cycle and 13% for the class cycle.
|
Published in
|
American Journal of Energy Engineering (Volume 13, Issue 3)
|
|
DOI
|
10.11648/j.ajee.20251303.13
|
|
Page(s)
|
118-132 |
|
Creative Commons
|

This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited.
|
|
Copyright
|
Copyright © The Author(s), 2025. Published by Science Publishing Group
|
Keywords
Plug-in Hybrid Vehicle, Energy Management Strategy, A_ECMS, Equivalent Factor, K-means
1. Introduction
Although they have been playing major roles in the human’s life over the last centuries, mobile vehicles are considered today one of the main sources contributing in numerous issues that has been facing our planet. Some of these adverse effects include the increase of atmospheric pollution, recurrent cardiovascular problems, emission of greenhouse gases contributing to global warming, and the weariness of fossil fuels
| [1] | Amir, M., Hossein S., Hamed, N., & Gevork, B. (2024). Optimum Energy Management Strategies for the Hybrid Sources-Powered Electric Vehicle Settings. 28th Electrical Power Distribution Conference. https://doi.org/10.1109/EPDC62178.2024.10571762 |
[1]
.
Regarding those increasing problems, there is an urgent need to accommodate the modern transportation means in order to cope with the anti-pollution standards implemented by the governments to limit harmful emissions. It is with this in mind that the automobile industry to develop more economical technologies in terms of fuel consumption in order to reduce the emission of CO
2, polluting gases and the depletion of oil. The most ideal solution is the electrification of the vehicle powertrain. The electric vehicle is powered by an electric motor powered by a battery. It is a vehicle with no CO
2 emissions since it does not require any combustion of fossil fuels. In addition, its traction chain has the advantage of allowing the reproduction of electrical energy through regenerative braking. However, due to the use of the battery, the electric vehicle does not constitute a viable alternative to the thermal vehicle because it has two major disadvantages: the low autonomy compared to the thermal vehicle and the cost
| [2] | Julakha, J., Mohd, A., Imran M., & Muhammad, I., (2024). Optimal energy management strategies for hybrid electric vehicles: A recent survey of machine learning approaches, Journal of Engineering Research. https://doi.org/10.1016/j.jer.2024.01.016 |
| [3] | Hamza Idrissi Hassani Azami. (2018). Real-time Optimal Predictive Control, applied to the control of Hybrid Motor Vehicles connected to their environments, National Polytechnic Institute of Toulouse. |
| [4] | Youcef B., Adel, O., & Rabindra, N. (2023). Hybrid power management and control of fuel cells-battery energy storage system in hybrid electric vehicle under three different modes. https://doi.org/10.1002/est2.511 |
[2-4]
.
In a hybrid vehicle, the torque to the wheels is provided by one or both energy chains. The objective of energy management is to find the distribution of power flows between the two traction chains, which minimizes fuel consumption while ensuring a given final state of charge of the battery. The algorithms for solving this problem called "energy management strategies or methods"
are classified into three categories namely rule-based methods, optimization methods and artificial intelligence methods. Rule-based methods are strategies based on empirical rules derived from the experiences acquired by experts on the behavior of the various components of the powertrain. These strategies include the thermostat method, the power tracking method, the state machine, and fuzzy logic
.
Optimization methods are methods for modeling a system and formulating the optimization problem in order to find solutions. Optimization methods are classified according to whether they can be implemented in real time (online strategies) or are intended solely for simulation (global optimization methods). Offline global optimization methods are based on a priori knowledge of the speed profile. These methods include dynamic programming (DP), Genetic Algorithms (GA), simulated annealing, and Particle Swarms Optimization (PSO).
Online optimization methods are strategies that can be implemented on real vehicle computers. These methods include the Equivalent Consumption Minimization Strategy (ECMS), the Pontryagin Maximum Principle (PMP), and model predictive control
| [3] | Hamza Idrissi Hassani Azami. (2018). Real-time Optimal Predictive Control, applied to the control of Hybrid Motor Vehicles connected to their environments, National Polytechnic Institute of Toulouse. |
| [5] | Yunfei, C., Ming, Y., & Xiaodong, S., (2023). Overview of Energy Modeling and Management Strategies for Hybrid Electric Vehicles. https://doi.org/10.3390/app13105947 |
[3, 5]
.
Artificial intelligence methods are strategies that allow the energy management system to learn to adapt to driving conditions in order to optimize energy distribution in real time. These are deep learning method, supervised learning method and reinforcement learning method
| [3] | Hamza Idrissi Hassani Azami. (2018). Real-time Optimal Predictive Control, applied to the control of Hybrid Motor Vehicles connected to their environments, National Polytechnic Institute of Toulouse. |
| [5] | Yunfei, C., Ming, Y., & Xiaodong, S., (2023). Overview of Energy Modeling and Management Strategies for Hybrid Electric Vehicles. https://doi.org/10.3390/app13105947 |
[3, 5]
.
The choice of the ECMS algorithm is motivated by its merits in terms of proven optimization potential and the possibility of its real-time implementation. The ECMS algorithm exists in its classic version with an invariable equivalence factor and its adaptive variant. Given the real driving conditions which are constantly changing, we chose to carry out this work with the adaptive ECMS. This will allow the equivalence factor to be updated according to the variation of driving conditions and styles. Three other algorithms are registered to carry out the adaptation of the equivalence factor, namely the PI controller, artificial neural networks and dynamic programming. This first article is devoted to the results obtained with the PI controller. The adaptation with artificial neural networks and dynamic programming is in progress. The PI controller minimizes the error between the target SOC and the current SOC.
2. Architectures of Hybrid Electric Vehicle
Several types of hybrid vehicle architectures have been investigated from the literature
| [1] | Amir, M., Hossein S., Hamed, N., & Gevork, B. (2024). Optimum Energy Management Strategies for the Hybrid Sources-Powered Electric Vehicle Settings. 28th Electrical Power Distribution Conference. https://doi.org/10.1109/EPDC62178.2024.10571762 |
| [6] | Saida K. (2009). Energy management of hybrid vehicles, university of Valentiennes and Hainaut Cambresis September. |
[1, 6]
. Among them, the serial and parallel architectures have drawn attention from many authors
| [1] | Amir, M., Hossein S., Hamed, N., & Gevork, B. (2024). Optimum Energy Management Strategies for the Hybrid Sources-Powered Electric Vehicle Settings. 28th Electrical Power Distribution Conference. https://doi.org/10.1109/EPDC62178.2024.10571762 |
| [6] | Saida K. (2009). Energy management of hybrid vehicles, university of Valentiennes and Hainaut Cambresis September. |
[1, 6]
.
2.1. Serial Architecture
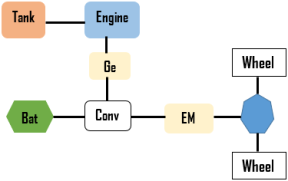
In a serial architecture as illustrated in
Figure 1, the power passes from the thermal engine to the electric motor which is responsible exclusively for traction of the vehicle. The connection between the two motors is an electrical connection via a generator which transforms mechanical energy into electrical energy that is later injected into the electrical chain
| [1] | Amir, M., Hossein S., Hamed, N., & Gevork, B. (2024). Optimum Energy Management Strategies for the Hybrid Sources-Powered Electric Vehicle Settings. 28th Electrical Power Distribution Conference. https://doi.org/10.1109/EPDC62178.2024.10571762 |
| [6] | Saida K. (2009). Energy management of hybrid vehicles, university of Valentiennes and Hainaut Cambresis September. |
[1, 6]
.
Figure 1. Serial hybrid architecture.
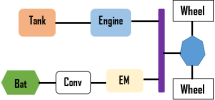
2.2. Parallel Architecture
In a parallel architecture, the two motors are directly coupled to the wheels. The power supplied to the wheels is the combination of the powers supplied by the two engines. This means the two engines can therefore participate simultaneously or independently in the propulsion of the vehicle. This is currently one of the most used architectures, since it exhibits numerous advantages over serial architecture. A wide range of car manufacturers employs this architecture to develop their products
| [1] | Amir, M., Hossein S., Hamed, N., & Gevork, B. (2024). Optimum Energy Management Strategies for the Hybrid Sources-Powered Electric Vehicle Settings. 28th Electrical Power Distribution Conference. https://doi.org/10.1109/EPDC62178.2024.10571762 |
| [6] | Saida K. (2009). Energy management of hybrid vehicles, university of Valentiennes and Hainaut Cambresis September. |
[1, 6]
.
Figure 2. Parallel hybrid architecture.
Where, EM, Bat, Conv, and Ge stand for Electrical Motor, Battery, Converter, and Generator, respectively.
There
are
many
other
architectures
including
serial-parallel
and
complex
architectures.
These
architectures
are
more
complex,
more
expensive
but
combine
the
advantages
of
both
serial
and
parallel
architectures.
Table 1 lists
the
advantages
and
disadvantages
of
all
the
aforementioned
architectures.
Table 1.
Advantages and disadvantages of various architectures of hybrid vehicle | [1] | Amir, M., Hossein S., Hamed, N., & Gevork, B. (2024). Optimum Energy Management Strategies for the Hybrid Sources-Powered Electric Vehicle Settings. 28th Electrical Power Distribution Conference. https://doi.org/10.1109/EPDC62178.2024.10571762 |
| [6] | Saida K. (2009). Energy management of hybrid vehicles, university of Valentiennes and Hainaut Cambresis September. |
Architecture | Benefits | Disadvantages |
Serial | Less polluting Ease of control | Low global efficiency large size of EM High-cost |
Parallel | All-electric mode Good overall efficiency Energy recovery during regenerative braking | Torque break when loading gearbox ratios |
Serial/Parallel | Combine the advantages of HS and HP | Complexity in the control High-cost |
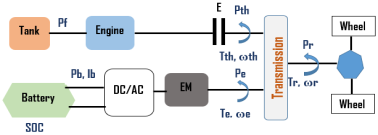
2.3. Parallel Hybrid Architecture Chosen
The
proposed
hybrid
vehicle
architecture
is
illustrated
in
Figure 3.
Figure 3. Proposed parallel hybrid architecture.
This architecture consists of two energy conversion chains. The thermal chain consists of a tank that stores the fuel, the internal combustion engine that converts the fuel into thermal energy, and the clutch that connects and disconnects the internal combustion engine to the transmission. The electrical or thermal energy is converted into mechanical energy by the crankshaft system. This mechanical energy is transmitted to the drive wheels in the form of kinetic energy to propel the vehicle.
The electrical chain consists of battery, inverter, and electric motor. The battery is the source of electrical energy. It provides voltage to the converter (inverter). The latter transforms this voltage into a three-phase voltage system that can be used by the electric motor. The displacement of the vehicle is characterized by the required factors, including the power, the torque, and the speed. The required power can be exclusively provided either by the engine or by the electric motor, or by both.
3. Equivalent Consumption Minimization Strategy (ECMS)
3.1. Presentation
Considered
as
one
of
the
main
orientations
in
the
area
of
research
related
to
energy
management
strategies,
ECMS
is
a
local
optimization
algorithm
first
developed
in
1999
by
Paganelli
| [7] | Jian F., & Zhiyu H. (2023). Research Progress on Equivalent Consumption Minimization Strategy Based on Different Information Sources for Hybrid Vehicles. in IEEE Transactions on Transportation Electrification. https://doi.org/10.1109/TTE.2023.3258639 |
[7]
.
In
ECMS
strategies,
the
main
purpose
of
an
optimization
problem
is
to
determining
a
key
parameter
referred
to
as
equivalence
factor;
allowing
the
state
of
charge
of
the
battery
to
be
maintained
around
a
target
reference
value.
This
Equivalence
factor
is
a
conversion
factor
between
electrical
energy
and
thermal
energy.
It
enables
to
bring
energy
consumption
into
the
same
energy
space
in
order
to
determine
the
optimal
control
variables
| [7] | Jian F., & Zhiyu H. (2023). Research Progress on Equivalent Consumption Minimization Strategy Based on Different Information Sources for Hybrid Vehicles. in IEEE Transactions on Transportation Electrification. https://doi.org/10.1109/TTE.2023.3258639 |
| [8] | Shibo L., Liang C., Shilin P., Jihao L., Zhuoran H., & Wen S., A Novel A-ECMS Energy Management Strategy Based on Dragonfly Algorithm for Plug-in FCEVs. (2023). 23, 1192. https://doi.org/10.3390/s23031192 |
| [9] | Xiaodong S., Mingzhou X., Yingfeng C., Xiang T., Zhijia J., & Long C. (2023). Adaptive ECMS Based on EF Optimization by Model Predictive Control for Plug-In Hybrid Electric Buses. IEEE transactions on transportation, electrification, 9(2). |
| [10] | Hsiu, Y. (2020). Developing Equivalent Consumption Minimization Strategy for Advanced Hybrid System-II Electric Vehicles. Energies, 13, 2033; https://doi.org/10.3390/en13082033 |
| [11] | Yacine Gaoua. (2014). Mathematical Models and non-linear and Combinatorial Optimization Techniques for the Energy Management of a Multi-Source System: Towards a Real-Time Implementation for Different Electrical Structures of Hybrid Vehicles, National Polytechnic Institute of Toulouse. |
| [12] | Geng, S.; Schulte, T.; Maas, J. Model-Based Analysis of Different Equivalent Consumption Minimization Strategies for a Plug-In Hybrid Electric Vehicle. Appl. Sci. 2022, 12, 2905. https://doi.org/ 10.3390/app12062905 |
| [13] | Piras, M., Bellis, V., Malfi, E., Jose, Desantes, M., Novella, R., & Lopez-Juarez, M. (2024). Incorporating speed forecasting and SOC planning into predictive ECMS for heavy-duty fuel cell vehicles, International Journal of Hydrogen Energy. https://doi.org/10.1016/j.ijhydene.2023.11.250 |
| [14] | J. L. (2020). Research on equivalent factor boundary of equivalent consumption minimization strategy for PHEV, IEEE Transactions on vehicular Technology, https://doi.org/10.1109/TVT.2020.2986541 |
| [15] | Chunna L., & Yan L. (2022). Energy Management Strategy for Plug-In Hybrid Electric Vehicles Based on Driving Condition Recognition: A Review. Electronics, 11(342). https://doi.org/10.3390/ electronics11030342 |
| [16] | Feng, J., Han, Z., Wu, Z., & Li M. (2022), Approximate optimal energy management with a high-precision vehicle speed prediction algorithm, P I MECH ENG D-J AUT, |
| [17] | Weiyi, L., Han Z., Bingzhan Z., Ye W., Yan X., Kang X., & Rui Z. (2022). Predictive Energy Management Strategy for Range-Extended Electric Vehicles Based on ITS Information and Start–Stop Optimization with Vehicle Velocity Forecast, |
| [18] | Lin, W.; Zhao, H., Zhang, B., Wang, Y., Xiao, Y., Xu, K., & Zhao, R. (2022). Predictive Energy Management Strategy for Range-Extended Electric Vehicles Based on ITS Information and Start–stop Optimization with Vehicle Velocity Forecast. Energies, 15 (7774). https://doi.org/10.3390/en15207774 |
| [19] | Pu, S. (2022). An Equivalent Consumption Minimization Strategy for a Parallel Plug-In Hybrid Electric Vehicle Based on an Environmental. Sensors 2022, 22(9621). https://doi.org/10.3390/s22249621 |
| [20] | Piras, M., Bellis, V., Malfi, E., Jose, Desantes, M., Novella, R., & Lopez-Juarez, M. (2023). Adaptive ECMS based on speed forecasting for the control of a heavy-duty fuel cell vehicle for real-world driving. https://doi.org/10.1016/j.enconman.2023.117178 |
| [21] | Sun, X., Cao, Y., Jin, Z., Tian, X., & Xue, M. (2022). An Adaptive ECMS Based on Traffic Information for Plug-in Hybrid Electric Buses. IEEE Trans. Ind. Electron. |
| [22] | Stefan, G., Thomas S., & Jürgen M. (2022). Model-Based Analysis of Different Equivalent Consumption Minimization Strategies for a Plug-In Hybrid Electric Vehicle, applied sciences, 12(2905). https://doi.org/10.3390/app12062905 |
| [23] | Cao, Y. (2022). An Overview of Modelling and Energy Management Strategies for Hybrid Electric Vehicles. Appl. Sci. 2023, 13(5947). https://doi.org/10.3390/ app13105947 |
| [24] | Pu, S., Chu, L., Hu, J., Li, S., & Hou, Z. (2022). An Equivalent Consumption Minimization Strategy for a Parallel Plug-In Hybrid Electric Vehicle Based on an Environmental Perceiver. Sensors, 22, 9621. https:// doi.org/10.3390/s22249621 |
| [25] | Thomas P. Harris. (2020). Implementation of a Radial Basis Function Artificial Neural Network in an Adaptive Equivalent Power Minimization Strategy for Optimized Control of a Hybrid Electric Vehicle, West Virginia University. |
| [26] | Nolwen S. (2023), Estimation of CO2 emissions at high spatial and temporal resolution for road transport in the Montreal district of Saint-Laurent, School of Technology. |
[7-26]
.
Several
variants
of
the
ECMS
exist
depending
on
how
the
equivalence
factor
is
evaluated
and
whether
or
not
the
available
external
information
is
integrated.
This
information
includes
traffic
information,
driver
information,
or
vehicle
information.
In
the
non-adaptive
variants
(Non-Adaptive
ECMS)
the
values
of
the
equivalence
factor
are
initially
chosen
while
the
adaptive
variants
(Adaptive
ECMS)
enable
the
equivalence
factor
to
be
updated
at
each
moment
of
the
journey.
The
values
of
equivalence
factor
are
selected
based
on
prediction
levels
of
future
driving
conditions.
ECMS
by
telemetry
(Telemetry
ECMS)
uses
information
provided
by
the
navigation
system
to
update
the
equivalence
factor
| [6] | Saida K. (2009). Energy management of hybrid vehicles, university of Valentiennes and Hainaut Cambresis September. |
| [7] | Jian F., & Zhiyu H. (2023). Research Progress on Equivalent Consumption Minimization Strategy Based on Different Information Sources for Hybrid Vehicles. in IEEE Transactions on Transportation Electrification. https://doi.org/10.1109/TTE.2023.3258639 |
[6,
7]
.
In offline ECMS methods, the equivalent factor is optimized using some optimization algorithms such as particle swarm optimization (PSO), and genetic (GA) algorithms.
This method involves the evaluation of the cost function as a sum of fuel consumption and corrected fuel consumption. The corrected consumption is calculated using the variation in the battery state of charge.
As
the
consumption
of
the
fuel
source
and
the
electrical
source
are
not
directly
comparable,
an
equivalence
factor
is
necessary.
This
factor
can
be
calculated
by
the
average
energy
trajectories
of
the
vehicle
sources.
As
the
efficiency
of
the
different
component
may
vary
between
areas
of
operation,
this
methodology
is
valid
for
evaluating
the
average
values
| [7] | Jian F., & Zhiyu H. (2023). Research Progress on Equivalent Consumption Minimization Strategy Based on Different Information Sources for Hybrid Vehicles. in IEEE Transactions on Transportation Electrification. https://doi.org/10.1109/TTE.2023.3258639 |
| [8] | Shibo L., Liang C., Shilin P., Jihao L., Zhuoran H., & Wen S., A Novel A-ECMS Energy Management Strategy Based on Dragonfly Algorithm for Plug-in FCEVs. (2023). 23, 1192. https://doi.org/10.3390/s23031192 |
| [9] | Xiaodong S., Mingzhou X., Yingfeng C., Xiang T., Zhijia J., & Long C. (2023). Adaptive ECMS Based on EF Optimization by Model Predictive Control for Plug-In Hybrid Electric Buses. IEEE transactions on transportation, electrification, 9(2). |
| [10] | Hsiu, Y. (2020). Developing Equivalent Consumption Minimization Strategy for Advanced Hybrid System-II Electric Vehicles. Energies, 13, 2033; https://doi.org/10.3390/en13082033 |
| [11] | Yacine Gaoua. (2014). Mathematical Models and non-linear and Combinatorial Optimization Techniques for the Energy Management of a Multi-Source System: Towards a Real-Time Implementation for Different Electrical Structures of Hybrid Vehicles, National Polytechnic Institute of Toulouse. |
| [12] | Geng, S.; Schulte, T.; Maas, J. Model-Based Analysis of Different Equivalent Consumption Minimization Strategies for a Plug-In Hybrid Electric Vehicle. Appl. Sci. 2022, 12, 2905. https://doi.org/ 10.3390/app12062905 |
| [13] | Piras, M., Bellis, V., Malfi, E., Jose, Desantes, M., Novella, R., & Lopez-Juarez, M. (2024). Incorporating speed forecasting and SOC planning into predictive ECMS for heavy-duty fuel cell vehicles, International Journal of Hydrogen Energy. https://doi.org/10.1016/j.ijhydene.2023.11.250 |
| [14] | J. L. (2020). Research on equivalent factor boundary of equivalent consumption minimization strategy for PHEV, IEEE Transactions on vehicular Technology, https://doi.org/10.1109/TVT.2020.2986541 |
| [15] | Chunna L., & Yan L. (2022). Energy Management Strategy for Plug-In Hybrid Electric Vehicles Based on Driving Condition Recognition: A Review. Electronics, 11(342). https://doi.org/10.3390/ electronics11030342 |
| [16] | Feng, J., Han, Z., Wu, Z., & Li M. (2022), Approximate optimal energy management with a high-precision vehicle speed prediction algorithm, P I MECH ENG D-J AUT, |
| [17] | Weiyi, L., Han Z., Bingzhan Z., Ye W., Yan X., Kang X., & Rui Z. (2022). Predictive Energy Management Strategy for Range-Extended Electric Vehicles Based on ITS Information and Start–Stop Optimization with Vehicle Velocity Forecast, |
| [18] | Lin, W.; Zhao, H., Zhang, B., Wang, Y., Xiao, Y., Xu, K., & Zhao, R. (2022). Predictive Energy Management Strategy for Range-Extended Electric Vehicles Based on ITS Information and Start–stop Optimization with Vehicle Velocity Forecast. Energies, 15 (7774). https://doi.org/10.3390/en15207774 |
| [19] | Pu, S. (2022). An Equivalent Consumption Minimization Strategy for a Parallel Plug-In Hybrid Electric Vehicle Based on an Environmental. Sensors 2022, 22(9621). https://doi.org/10.3390/s22249621 |
| [20] | Piras, M., Bellis, V., Malfi, E., Jose, Desantes, M., Novella, R., & Lopez-Juarez, M. (2023). Adaptive ECMS based on speed forecasting for the control of a heavy-duty fuel cell vehicle for real-world driving. https://doi.org/10.1016/j.enconman.2023.117178 |
| [21] | Sun, X., Cao, Y., Jin, Z., Tian, X., & Xue, M. (2022). An Adaptive ECMS Based on Traffic Information for Plug-in Hybrid Electric Buses. IEEE Trans. Ind. Electron. |
| [22] | Stefan, G., Thomas S., & Jürgen M. (2022). Model-Based Analysis of Different Equivalent Consumption Minimization Strategies for a Plug-In Hybrid Electric Vehicle, applied sciences, 12(2905). https://doi.org/10.3390/app12062905 |
| [23] | Cao, Y. (2022). An Overview of Modelling and Energy Management Strategies for Hybrid Electric Vehicles. Appl. Sci. 2023, 13(5947). https://doi.org/10.3390/ app13105947 |
| [24] | Pu, S., Chu, L., Hu, J., Li, S., & Hou, Z. (2022). An Equivalent Consumption Minimization Strategy for a Parallel Plug-In Hybrid Electric Vehicle Based on an Environmental Perceiver. Sensors, 22, 9621. https:// doi.org/10.3390/s22249621 |
| [25] | Thomas P. Harris. (2020). Implementation of a Radial Basis Function Artificial Neural Network in an Adaptive Equivalent Power Minimization Strategy for Optimized Control of a Hybrid Electric Vehicle, West Virginia University. |
| [26] | Nolwen S. (2023), Estimation of CO2 emissions at high spatial and temporal resolution for road transport in the Montreal district of Saint-Laurent, School of Technology. |
[7-26]
.
In ECMS approaches, the battery is considered an auxiliary fuel tank. This enables the choice of the control variables at any moment; yielding to the minimization of the total energy taken from the two tanks via an equivalence factor. Moreover, this eases the possibility to convert the electrical energy into mechanical energy; bringing back the two consumptions in the same energy space.
The energy distribution by the two sources obeys two cases:
The
first
case
is
a
discharge
of
the
battery
at
instant
t.
This
corresponds
to
a
quantity
of
electrical
energy
taken
from
the
battery
at
that
moment.
This
quantity
of
energy
must
be
restored
to
the
battery
during
the
instant
t'>t.
At
this
time,
the
quantity
of
fuel
consumed
must
guarantee
the
traction
of
the
vehicle
and
participate
in
recharging
the
battery
| [11] | Yacine Gaoua. (2014). Mathematical Models and non-linear and Combinatorial Optimization Techniques for the Energy Management of a Multi-Source System: Towards a Real-Time Implementation for Different Electrical Structures of Hybrid Vehicles, National Polytechnic Institute of Toulouse. |
[11]
.
The
second
case
corresponds
to
the
storage
of
electrical
energy
in
the
battery
(recharging
the
battery)
at
a
time
t.
At
the
instant
t'>t,
the
stored
energy
will
contribute
to
both
the
traction
of
the
vehicle
and
fuel
economy
| [11] | Yacine Gaoua. (2014). Mathematical Models and non-linear and Combinatorial Optimization Techniques for the Energy Management of a Multi-Source System: Towards a Real-Time Implementation for Different Electrical Structures of Hybrid Vehicles, National Polytechnic Institute of Toulouse. |
[11]
.
The
energy
distribution
of
the
hybrid
vehicle
according
to
the
operating
mode
is
illustrated
in
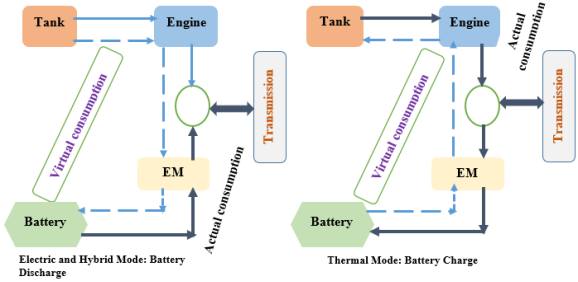
Figure 4.
Figure 4. Energy distribution of the hybrid vehicle.
This figure shows how the ECMS algorithm works in converting electrical and thermal energy to bring both consumptions into the same energy range across the three operating modes.
In electric and hybrid mode, the electric motor contributes to the vehicle's traction by consuming electrical energy. This actual electrical energy consumption is converted into its fuel equivalent (virtual consumption), which will be released in thermal mode.
In thermal mode, the engine provides traction by consuming fuel. This actual fuel consumption is converted into its electrical equivalent (virtual consumption), which will be released later in electric mode.
The original expression of the ECMS algorithm proposed by Paganelli is expressed from equations (
12) to (
17)
| [10] | Hsiu, Y. (2020). Developing Equivalent Consumption Minimization Strategy for Advanced Hybrid System-II Electric Vehicles. Energies, 13, 2033; https://doi.org/10.3390/en13082033 |
| [11] | Yacine Gaoua. (2014). Mathematical Models and non-linear and Combinatorial Optimization Techniques for the Energy Management of a Multi-Source System: Towards a Real-Time Implementation for Different Electrical Structures of Hybrid Vehicles, National Polytechnic Institute of Toulouse. |
[10, 11]
.
Where are the total equivalent instantaneous consumption, the instantaneous fuel consumption and the instantaneous electrical energy consumption, respectively.
Instantaneous consumption of fuel and electrical energy is expressed according to the characteristics of engine and electric motor.
 (2)
(2)  (3)
(3)  (4)
(4)  (5)
(5) Where Pth is the power of the engine, Pr the required power, u the control variable vector, Pb the power of the battery, QLHV the minimum released heat due to fuel combustion, ƞth the efficiency of the engine, and s the equivalence factor.
To ensure battery safety, we define a penalty factor based on the SOC instantly and allowing to maintain it between its limit values. This penalty factor is attributed to the consumption of electrical energy. It allows the use of electrical energy when the SOC is close to the maximum SOC of the battery and to switch to the thermal engine when the SOC is close to the minimum SOC. This facilitates the delimitation of the SOC between the two values and its maintenance around a target SOC. This SOC target should be specified based on battery efficiency
| [25] | Thomas P. Harris. (2020). Implementation of a Radial Basis Function Artificial Neural Network in an Adaptive Equivalent Power Minimization Strategy for Optimized Control of a Hybrid Electric Vehicle, West Virginia University. |
[25]
.
 (6)
(6) Where ρ(SOC) is the penalty and a the penalty factor
 (7)
(7) The equivalent power is expressed by:
 (8)
(8) is the equivalent mass
 (9)
(9) The power of the engine is expressed as a function of the crankshaft torque and the engine speed.
 (10)
(10) Tth is the crankshaft torque
⍵th is the speed of engine
 (11)
(11) Pc is the thermodynamic power associated with the fuel
 (12)
(12) mf is the mass of fuel
HPCI is the is the lower calorific value of the fuel
 (13)
(13)  (14)
(14) 
is the optimal solution of the control variables.
3.2. Adaptive ECMS Strategies for Hybrid Electric Vehicles Based on SOC Feedback
The equivalence factor update is performed with a PI controller. The latter minimizes the error between the target SOC and the instantaneous SOC.
 (15)
(15) Where S0 is the initial equivalence factor, Kp the proportional corrector gain, Ki the integral corrector gain.
The role of proportional correction is to ensure battery charging when the SOC approaches its lower limit value, and symmetrically to ensure battery discharge when the SOC approaches its upper limit value.
The role of integral correction is to center the SOC trajectory around target SOC in the case where the optimal equivalence factor estimation error results in the appearance of a static error.
Where ε is the error between the target SOC and the current SOC.
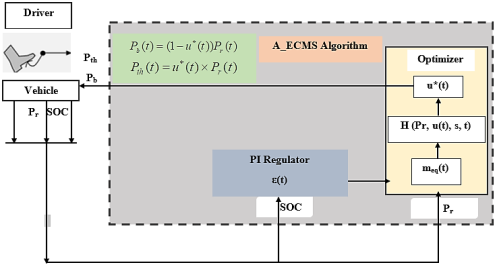
Figure 5 shows the diagram of the A_ECMS algorithm.
Figure 5. Diagram of A_ECMS.
When the driver presses the accelerator pedal, they express a power requirement that is sent to the control system based on the A_ECMS algorithm. The control system evaluates the energy level available in the battery through its state of charge and distributes the required power between the energy chains. The power that each of the two motors will have to provide is then sent to them.
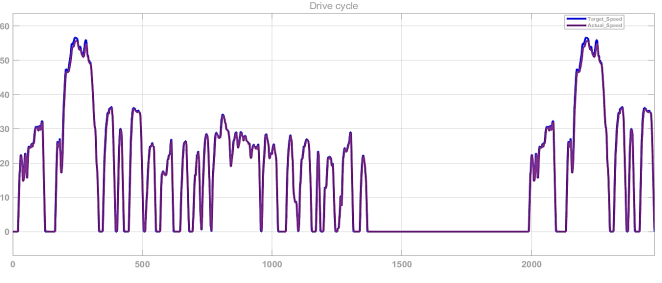
Figure 6. Reference speed and vehicle speed.
3.3. Emission of Atmospheric Pollutants
The masses of air pollutants emitted by the vehicle are estimated by equations
18, 19, 20 and
21 from the Panis
| [26] | Nolwen S. (2023), Estimation of CO2 emissions at high spatial and temporal resolution for road transport in the Montreal district of Saint-Laurent, School of Technology. |
[26]
and Tobias
| [27] | Tobias N., Alberto C., Giorgio M., Nicolò C., Christopher O., & Lino Guzzella. (2014). Equivalent Consumption Minimization Strategy for the Control of Real Driving NOx Emissions of a Diesel Hybrid Electric Vehicle, Energies, 3148-3178. https://doi.org/10.3390/en7053148 |
[27]
models.
(17)
(20)
Where , , , are mass emitted of , , and , respectively.
And , , , are mass flow rate of , , and , respectively, is the speed of vehicle.
3.4. Drives Cycles
A driving cycle is the representation of vehicle speed versus time during a given trip. The speed cycle includes road conditions and driving style. Standardized speed cycles are speed cycles set up to represent certain particular road conditions to carry out simulations and experimental tests.
Firstly, the FTP-75 (Federal Test Protocol) speed cycle is used first and then a set of classified speed cycles.
The FTP-75 driving cycle simulates a 17.9 km urban route in 31 minutes.
Figure 6 shows the FTP-75 speed cycle. This cycle is made up of three phases: First phase of 505s with a cold start, second phase of 864s and a third phase of 500s with a hot start after a 10-minute stop.
The vehicle speed has almost the same shape as the reference speed of the driving cycle. To observe overall compliance with the speed instructions.
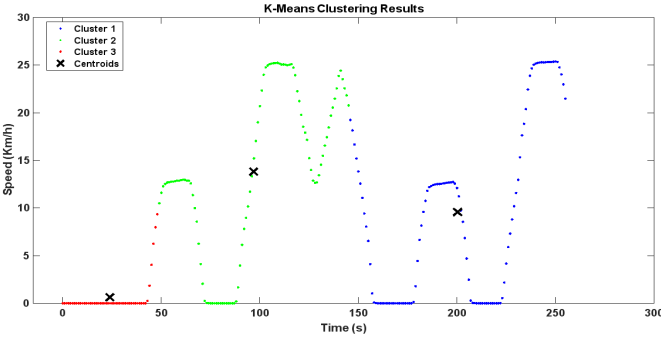
Secondly, forty-five (45) speed cycles were downloaded into the ADVISOR. ADVISOR is a software simulation program based on MATLAB/Simulink. This program aims to evaluate the energy consumption of conventional, hybrid and electric vehicles in order to analyze energy management performance and fuel economy. The forty-five (45) driving cycles are categorized into three classes using the K-means algorithm. K-means is an automatic classification algorithm making it possible to identify groups of speed cycles which have similar characteristics, that is to say which are distinguished from each other in a significant way. Thus, for a given integer K, the algorithm categorizes the set of speed cycles into K clusters (K classes), where K is equal to three (3).
The
Figure 7 shows the three classes of speed cycles after clustering.
Figure 7. Driving cycle classes.
Speed cycles are classified according to speed ranges, which often depend on driving conditions and styles.
Class 1 = Phase 1: Driving cycle classes for urban and semi-urban roads (low speeds).
Class 2 = Phase 2: Driving cycle classes for highways (medium and high speeds).
Class 3 = Phase 3: Driving cycle classes for urban and semi-urban roads (medium and high speeds).
The k-means algorithm is based on evaluating the distance between observations and the centroids of the clusters. This distance can be determined using functions for measuring the dissimilarity between observations such as Euclidean distance, Manhattan distance and Minkowski distance
| [28] | Ricco R., Mobil center methods, Classification by partition-Reallocation method, Lumiere Lyon 2 University. |
[28]
.
When the algorithm is executed, K observations are arbitrarily chosen as initial centroids of the K clusters.
For a number n of observations in an n-dimensional space, the Euclidean distance between each centroid ci and each observation ui is:
(21)
Each observation is associated with the cluster whose centroid is the closest among the k centroids initially chosen randomly, that is to say whose centroid distance is minimal.
(22)
Then, each of the observations is associated with the cluster whose center is closest to this observation in relation to all the centers of the other clusters.
The cluster centroids are again chosen from the observations of these clusters and the Euclidean distances between each centroid and each observation are recalculated using the current cluster memberships. Likewise, the association of the different observations with the closest new clusters is carried out again. This process is repeated until the convergence criterion is reached. The convergence criterion is reached when there is no real change between two successive operations
| [29] | Francis B. (2011), K-means, EM, Mixtures of Gaussiens, Graphe Theory. |
| [30] | Angelina R. Data Analysis, CAH and K-means, Executive Master Statistics and Big Data. |
[29, 30]
.
4. Simulations
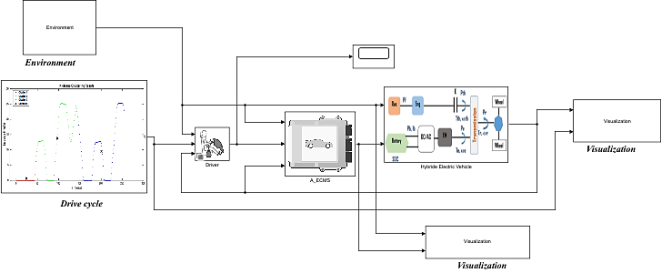
The simulations are carried out in matlab/simulink using the model of a parallel hybrid vehicle provided by MathWorks.
The simulations carried out highlight the energy flows and their distribution according to the different operating modes of the hybrid vehicle.
Figure 8 shows the diagram of simulation in Simulink environment.
Figure 8. Diagram of simulation in Simulink.
The parameters of the Vehicle components
are given in
Table 2.
Table 2. Vehicle components.
Component | Type |
Engine | Spark ignition Engine |
Electric motor | Permanent magnet synchronous motor |
Battery | Lithium Ion Battery |
The driver model simulates a human driver through a predictive controller that minimizes the error between a set speed and the actual speed of the vehicle.
The parameters of the A_ECMS algorithm are given in
Table 3.
Table 3. Parameters of the A_ECMS algorithm.
Size | Value |
Equivalence factor | 4.76 |
Harm factor | 3 |
Proportional gain, ECMS_Kp | 4 |
Integral gain, ECMS_Ki | 2 |
Target state of charge | 60 |
Maximum state of charge | 80 |
Minimum state of charge | 40 |
5. Results and Analysis
5.1. Simulation Results with FTP-75 Driving Cycle
The controller receives instructions from the accelerator pedal deduced from the FTP-75 (Federal Test Protocol) driving cycle and generates torque commands from the thermal and electric motors.
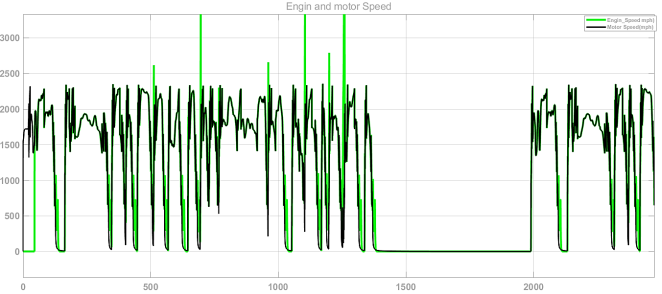
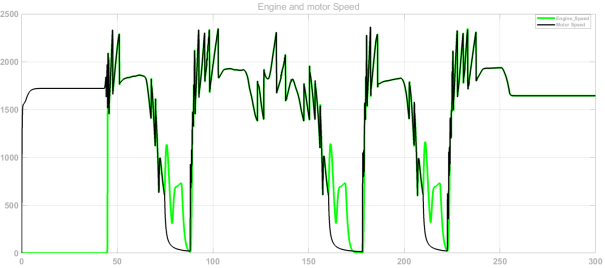
Figure 9 shows the speeds of the engine and electric motor on the FTP-75 cycle. We see that the two speeds are similar. This is because in simulations of conventional and hybrid vehicles, the engines are used in the speed range between idle speed and 4000 rpm. This means that the maximum speeds of the ICE and the EM are close to each other.
Figure 9. Speeds of the thermal and electric motors.
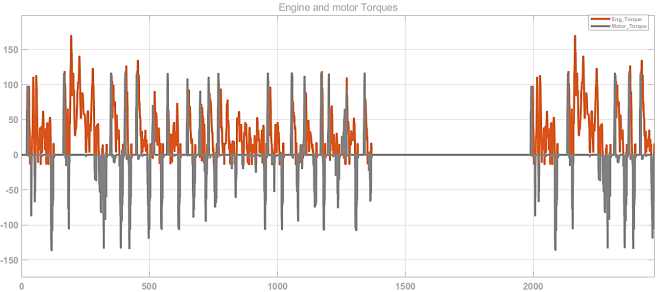
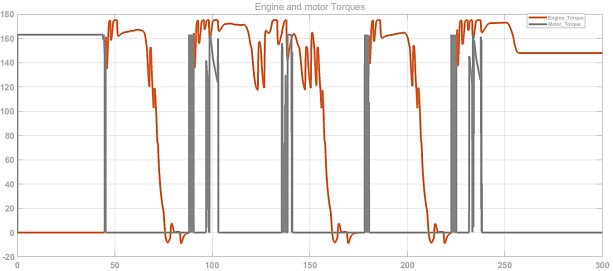
Figure 10. Torques of thermal and electric motors.
Figure 10 shows the evolution of the torques of the two motors. The vehicle starts in electric mode. This mode is maintained until the energy available in the battery cannot meet the driver's demand. The engine is thus put into operation. Acceleration corresponds to a high demand for torque and therefore activated thermal engine.
There are three operating zones of the two engines corresponding to the different driving modes.
The first zone is the low torque demand zone (low speeds). This is the operating zone in all-electric mode.
The second zone is the zone of medium and high torque demands with battery charge. However, the energy available in the battery cannot cover the torque demand. This is the operating zone in hybrid mode where the torque at the wheel is the combination of the torques of the two engines.
The third zone is the zone of high acceleration and very low battery charge. Thus, only the heat engine provides traction for the vehicle.
Negative values of electric motor torque illustrate the operating zones of the electric motor in generator mode. This is energy recovery mode.
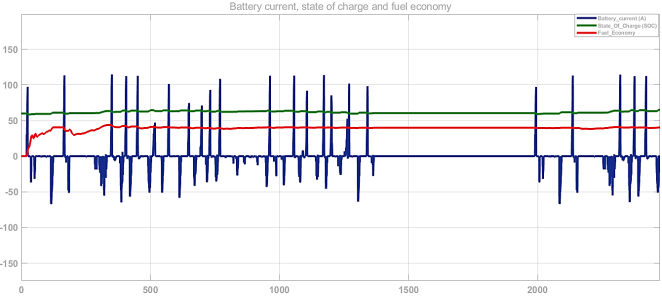
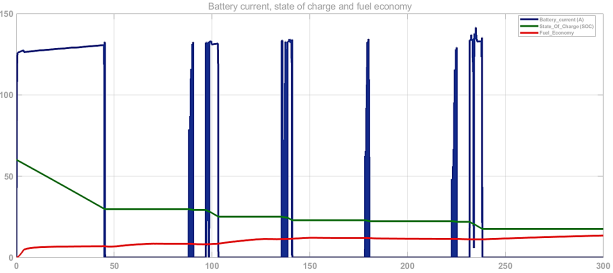
Figure 11 presents the evolution of battery current, state of charge and fuel economy with an initial SOC of 40%.
At start-up a low power requirement arises, which is provided only by the electric motor. Later (120 to 150 s), the demand for power, after driving in electric mode, the battery being at its minimum, the electric chain can only provide very little electrical assistance during acceleration.
Figure 11. Battery current, state of charge and fuel economy.
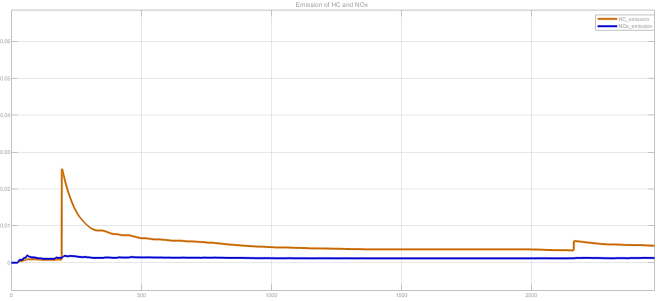
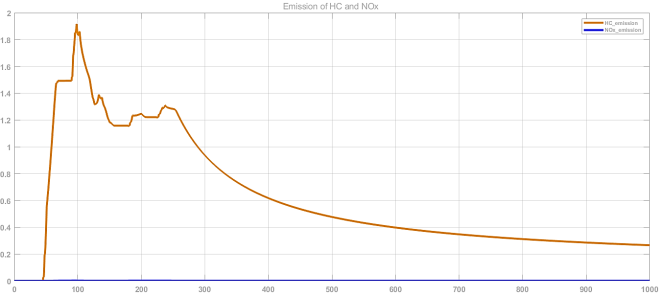
Figure 12 presents the evolution of masses of hydrocarbons and nitrogen oxides.
Figure 12. Estimation curves for the masses of hydrocarbons and nitrogen oxides.
The mass of NOx is very low (0.002 g/km), while that of HC varies around 0.003 g/km, with a peak of 0.018 g/km at t=200s.
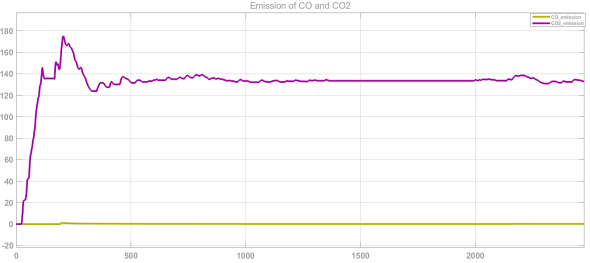
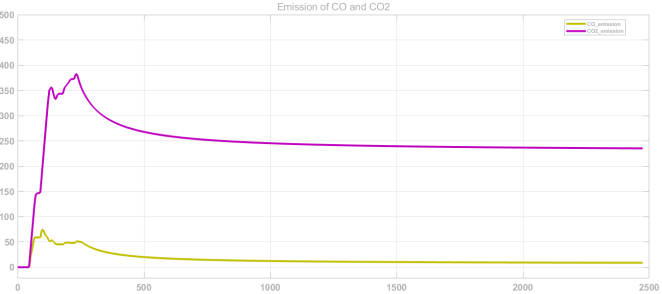
Figure 13 presents the evolution of masses of carbon monoxide and dioxide.
Figure 13. Estimation curves for the masses of carbon monoxide and dioxide.
The mass of CO is practically negligible, while that of CO2 is significant and proportional to fuel consumption.
Table 4 presents quantity of air pollutants emitted in g/km.
Figure 14. Speeds of the engine and electric motor.
Table 4. Quantity of air pollutants emitted in g/km.
Air pollutants | Quantity emitted in g/Km |
CO2 | 130 |
CO | 0.1 |
NOx | 0.03 |
HC | 0.005 à 0.027 |
The mass photos of CO2 (175g/km and 142g/km) and HC (0.018g/km and 0.002g/km) are observable in 200s, 400s and 2200s.
5.2. Simulation Results with Driving Cycle Classes
Figure 14 presents the evolution of Speeds of the thermal and electric motors.
Figure 15 presents the evolution of torques of thermal and electric motors.
Figure 15. Torques of engine and electric motor.
The vehicle starts in pure electric mode and travels for a certain distance. The battery charge gradually decreases until it cannot meet the power demand. The internal combustion engine is then activated.
There are three operating modes:
Electric mode: Only the electric motor provides the required torque.
Internal combustion mode: The required torque is equal to the internal combustion engine torque.
Hybrid mode: The required torque is the combination of the torques of the two engines.
Figure 16 presents the evolution of the state of Battery current, state of charge and fuel economy.
Figure 16. Battery current, state of charge and fuel economy.
The current increases at startup, which results in a significant increase in fuel economy. Thermal mode degrades fuel economy.
Figure 17 presents the evolution of masses of carbon monoxide and dioxide.
Figure 17. Estimation curves for the masses of carbon monoxide and dioxide.
Figure 18 presents the evolution of masses of hydrocarbons and nitrogen oxides.
Figure 18. Estimation curves for the masses of hydrocarbons and nitrogen oxides.
Table 5 presents quantity of air pollutants emitted in g/km.
Table 5. Quantity of air pollutants emitted in g/km.
Air pollutants | Quantity emitted in g/Km |
CO2 | 230 |
CO | 12 |
NOx | 0.001 |
HC | 0.2 à 1.85 |
5.3. Analysis
Initially, the vehicle starts and operates in electric mode, exclusively. Over a long period of time, the battery alone cannot provide the necessary energy for traction of the vehicle, and therefore the thermal engine is activated, Thus the vehicle operates in hybrid mode. Later on, the vehicle switches exclusively into the thermal mode because the energy in the battery becomes below the limit of its operating level.
When it is operating, the electric motor develops a resistive torque in case of deceleration, dismounting or regenerative braking; hence working in generator mode. The recovered kinetic energy is stored in the battery.
Clearly, in electric mode, it can be observed a sharp improvement in terms of fuel economy. When the system switches into thermal mode, the fuel economy gets degraded.
This means that the approach employed in this paper leads to a substantial reduction in terms of fuel consumption, showing a fuel savings of around 40% for FTP-75 and 13% for the class cycle.
6. Conclusion
This paper investigated the effect of ECMS algorithm on hybrid electric vehicle. The work mainly focused on energy management using the aforementioned strategy on that type of vehicle. The performance of that approach was evaluated through extensive simulations. The simulation results showed the potential of the strategy for optimizing the vehicle's energy consumption over a given speed cycle.
The average fuel savings achieved by the A_ECMS Strategy are 40% for FTP-75 and 13% for the class cycle.
The difference in terms of fuel economy between the FTP-75 and the class cycles is mainly due to the fact that the class cycle includes numerous roads conditions such as: flat road, bush, highway, and urban road, and also considers many driving conditions (45 cycles).
The work also estimated the quantity of atmospheric pollutants including CO
2, CO, HC, and NO
X emitted by the vehicle over time. The average quantity of CO
2 emitted is 30g/km which is close to the value given in the literature (25g/km) for FTP-75 while it is 230 g/km for the class cycle against 246 g/km given in the literature
| [27] | Tobias N., Alberto C., Giorgio M., Nicolò C., Christopher O., & Lino Guzzella. (2014). Equivalent Consumption Minimization Strategy for the Control of Real Driving NOx Emissions of a Diesel Hybrid Electric Vehicle, Energies, 3148-3178. https://doi.org/10.3390/en7053148 |
| [31] | Jan D. (2021). Plug-in hybrid vehicle CO2 emissions: how they are affected by ambient conditions and driver mode selection, White Paper, The International Council on Clean Transportation. |
[27, 31]
.
Adapting the equivalence factor is essential to guarantee the robustness of the SOC trajectory monitoring. It is this adaptation that determines the overall performance of the strategy on the journey.
Abbreviations
A_ECMS | Adaptive Equivalent Consumption Minimization Strategy |
CO2 | Carbon Dioxide |
CO | Carbon Monoxide |
DC/AC | Direct Current/Alternative Current |
DP | Dynamic Programing |
ECMS | Equivalent Consumption Minimization Strategy |
EM | Electric Motor |
FTP | Federal Test Protocol |
GA | Genetic Algorithms |
HC | Hydrocarbon |
LHV | Low Heat Value |
NOx | nitric oxide |
PMP | Pontryagin Maximum Principle |
PSO | Particle Swarms Optimization |
Author Contributions
Yahouza Chaibou Chapi: Conceptualization, Data curation, Formal Analysis, Investigation, Methodology, Software, Visualization, Writing – original draft
Noma Talibi Soumaïla: Conceptualization, Methodology, Project administration, Resources, Software, Supervision, Validation, Visualization, Writing – review & editing
Attoumane Kosso Mamadou Moustapha: Methodology, Project administration, Resources, Supervision, Validation, Writing – review & editing
Insa Issoufou Moussa: Methodology, Project administration, Resources, Supervision, Validation, Writing – review & editing
Boureima Seibou: Conceptualization, Methodology, Project administration, Resources, Supervision, Validation, Writing – review & editing
Conflicts of Interest
The authors declare no conflicts of interest.
References
| [1] |
Amir, M., Hossein S., Hamed, N., & Gevork, B. (2024). Optimum Energy Management Strategies for the Hybrid Sources-Powered Electric Vehicle Settings. 28th Electrical Power Distribution Conference.
https://doi.org/10.1109/EPDC62178.2024.10571762
|
| [2] |
Julakha, J., Mohd, A., Imran M., & Muhammad, I., (2024). Optimal energy management strategies for hybrid electric vehicles: A recent survey of machine learning approaches, Journal of Engineering Research.
https://doi.org/10.1016/j.jer.2024.01.016
|
| [3] |
Hamza Idrissi Hassani Azami. (2018). Real-time Optimal Predictive Control, applied to the control of Hybrid Motor Vehicles connected to their environments, National Polytechnic Institute of Toulouse.
|
| [4] |
Youcef B., Adel, O., & Rabindra, N. (2023). Hybrid power management and control of fuel cells-battery energy storage system in hybrid electric vehicle under three different modes.
https://doi.org/10.1002/est2.511
|
| [5] |
Yunfei, C., Ming, Y., & Xiaodong, S., (2023). Overview of Energy Modeling and Management Strategies for Hybrid Electric Vehicles.
https://doi.org/10.3390/app13105947
|
| [6] |
Saida K. (2009). Energy management of hybrid vehicles, university of Valentiennes and Hainaut Cambresis September.
|
| [7] |
Jian F., & Zhiyu H. (2023). Research Progress on Equivalent Consumption Minimization Strategy Based on Different Information Sources for Hybrid Vehicles. in IEEE Transactions on Transportation Electrification.
https://doi.org/10.1109/TTE.2023.3258639
|
| [8] |
Shibo L., Liang C., Shilin P., Jihao L., Zhuoran H., & Wen S., A Novel A-ECMS Energy Management Strategy Based on Dragonfly Algorithm for Plug-in FCEVs. (2023). 23, 1192.
https://doi.org/10.3390/s23031192
|
| [9] |
Xiaodong S., Mingzhou X., Yingfeng C., Xiang T., Zhijia J., & Long C. (2023). Adaptive ECMS Based on EF Optimization by Model Predictive Control for Plug-In Hybrid Electric Buses. IEEE transactions on transportation, electrification, 9(2).
|
| [10] |
Hsiu, Y. (2020). Developing Equivalent Consumption Minimization Strategy for Advanced Hybrid System-II Electric Vehicles. Energies, 13, 2033;
https://doi.org/10.3390/en13082033
|
| [11] |
Yacine Gaoua. (2014). Mathematical Models and non-linear and Combinatorial Optimization Techniques for the Energy Management of a Multi-Source System: Towards a Real-Time Implementation for Different Electrical Structures of Hybrid Vehicles, National Polytechnic Institute of Toulouse.
|
| [12] |
Geng, S.; Schulte, T.; Maas, J. Model-Based Analysis of Different Equivalent Consumption Minimization Strategies for a Plug-In Hybrid Electric Vehicle. Appl. Sci. 2022, 12, 2905.
https://doi.org/ 10.3390/app12062905
|
| [13] |
Piras, M., Bellis, V., Malfi, E., Jose, Desantes, M., Novella, R., & Lopez-Juarez, M. (2024). Incorporating speed forecasting and SOC planning into predictive ECMS for heavy-duty fuel cell vehicles, International Journal of Hydrogen Energy.
https://doi.org/10.1016/j.ijhydene.2023.11.250
|
| [14] |
J. L. (2020). Research on equivalent factor boundary of equivalent consumption minimization strategy for PHEV, IEEE Transactions on vehicular Technology,
https://doi.org/10.1109/TVT.2020.2986541
|
| [15] |
Chunna L., & Yan L. (2022). Energy Management Strategy for Plug-In Hybrid Electric Vehicles Based on Driving Condition Recognition: A Review. Electronics, 11(342).
https://doi.org/10.3390/ electronics11030342
|
| [16] |
Feng, J., Han, Z., Wu, Z., & Li M. (2022), Approximate optimal energy management with a high-precision vehicle speed prediction algorithm, P I MECH ENG D-J AUT,
|
| [17] |
Weiyi, L., Han Z., Bingzhan Z., Ye W., Yan X., Kang X., & Rui Z. (2022). Predictive Energy Management Strategy for Range-Extended Electric Vehicles Based on ITS Information and Start–Stop Optimization with Vehicle Velocity Forecast,
|
| [18] |
Lin, W.; Zhao, H., Zhang, B., Wang, Y., Xiao, Y., Xu, K., & Zhao, R. (2022). Predictive Energy Management Strategy for Range-Extended Electric Vehicles Based on ITS Information and Start–stop Optimization with Vehicle Velocity Forecast. Energies, 15 (7774).
https://doi.org/10.3390/en15207774
|
| [19] |
Pu, S. (2022). An Equivalent Consumption Minimization Strategy for a Parallel Plug-In Hybrid Electric Vehicle Based on an Environmental. Sensors 2022, 22(9621).
https://doi.org/10.3390/s22249621
|
| [20] |
Piras, M., Bellis, V., Malfi, E., Jose, Desantes, M., Novella, R., & Lopez-Juarez, M. (2023). Adaptive ECMS based on speed forecasting for the control of a heavy-duty fuel cell vehicle for real-world driving.
https://doi.org/10.1016/j.enconman.2023.117178
|
| [21] |
Sun, X., Cao, Y., Jin, Z., Tian, X., & Xue, M. (2022). An Adaptive ECMS Based on Traffic Information for Plug-in Hybrid Electric Buses. IEEE Trans. Ind. Electron.
|
| [22] |
Stefan, G., Thomas S., & Jürgen M. (2022). Model-Based Analysis of Different Equivalent Consumption Minimization Strategies for a Plug-In Hybrid Electric Vehicle, applied sciences, 12(2905).
https://doi.org/10.3390/app12062905
|
| [23] |
Cao, Y. (2022). An Overview of Modelling and Energy Management Strategies for Hybrid Electric Vehicles. Appl. Sci. 2023, 13(5947).
https://doi.org/10.3390/ app13105947
|
| [24] |
Pu, S., Chu, L., Hu, J., Li, S., & Hou, Z. (2022). An Equivalent Consumption Minimization Strategy for a Parallel Plug-In Hybrid Electric Vehicle Based on an Environmental Perceiver. Sensors, 22, 9621.
https:// doi.org/10.3390/s22249621
|
| [25] |
Thomas P. Harris. (2020). Implementation of a Radial Basis Function Artificial Neural Network in an Adaptive Equivalent Power Minimization Strategy for Optimized Control of a Hybrid Electric Vehicle, West Virginia University.
|
| [26] |
Nolwen S. (2023), Estimation of CO2 emissions at high spatial and temporal resolution for road transport in the Montreal district of Saint-Laurent, School of Technology.
|
| [27] |
Tobias N., Alberto C., Giorgio M., Nicolò C., Christopher O., & Lino Guzzella. (2014). Equivalent Consumption Minimization Strategy for the Control of Real Driving NOx Emissions of a Diesel Hybrid Electric Vehicle, Energies, 3148-3178.
https://doi.org/10.3390/en7053148
|
| [28] |
Ricco R., Mobil center methods, Classification by partition-Reallocation method, Lumiere Lyon 2 University.
|
| [29] |
Francis B. (2011), K-means, EM, Mixtures of Gaussiens, Graphe Theory.
|
| [30] |
Angelina R. Data Analysis, CAH and K-means, Executive Master Statistics and Big Data.
|
| [31] |
Jan D. (2021). Plug-in hybrid vehicle CO2 emissions: how they are affected by ambient conditions and driver mode selection, White Paper, The International Council on Clean Transportation.
|
Cite This Article
-
APA Style
Chapi, Y. C., Soumaïla, N. T., Moustapha, A. K. M., Moussa, I. I., Seibou, B. (2025). Adaptive ECMS for Hybrid Electric Vehicles Based on SOC Feedback. American Journal of Energy Engineering, 13(3), 118-132. https://doi.org/10.11648/j.ajee.20251303.13
 Copy
|
Copy
|
 Download
Download
ACS Style
Chapi, Y. C.; Soumaïla, N. T.; Moustapha, A. K. M.; Moussa, I. I.; Seibou, B. Adaptive ECMS for Hybrid Electric Vehicles Based on SOC Feedback. Am. J. Energy Eng. 2025, 13(3), 118-132. doi: 10.11648/j.ajee.20251303.13
Copy
|
Download
AMA Style
Chapi YC, Soumaïla NT, Moustapha AKM, Moussa II, Seibou B. Adaptive ECMS for Hybrid Electric Vehicles Based on SOC Feedback. Am J Energy Eng. 2025;13(3):118-132. doi: 10.11648/j.ajee.20251303.13
Copy
|
Download
-
@article{10.11648/j.ajee.20251303.13,
author = {Yahouza Chaibou Chapi and Noma Talibi Soumaïla and Attoumane Kosso Mamadou Moustapha and Insa Issoufou Moussa and Boureima Seibou},
title = {Adaptive ECMS for Hybrid Electric Vehicles Based on SOC Feedback},
journal = {American Journal of Energy Engineering},
volume = {13},
number = {3},
pages = {118-132},
doi = {10.11648/j.ajee.20251303.13},
url = {https://doi.org/10.11648/j.ajee.20251303.13},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.ajee.20251303.13},
abstract = {The negative impact of atmospheric pollutants emitted by mobile vehicles on human health and environment have been increasingly attracting the attention of public and private policy makers. Those entities and many other have been working together to ensure that emissions related to the consumption of fossil fuels are considerably minimize. One of the main authors of this problem seems to be the means of displacement we are using every day, thermal cars. It is therefore necessary to explore and develop more economical approaches and modern alternatives for vehicle energy consumption. It is within this framework that automobile manufacturers, in collaboration with researchers, are committed to developing new forms of transport, the most ideal of which are electric vehicles and hybrid electric vehicles. This paper discusses the modeling and optimization of energy management of hybrid electric vehicles. The article develops an energy management system to minimize the energy consumption of a hybrid electric vehicle. Hybrid electric vehicle control is managed by the Adaptive Equivalent Consumption Minimization Strategy (A_ECMS). This strategy performs an update of the equivalence factor through the battery state of charge feedback method. The simulation results shown that the A_ECMS approach achieved an average fuel saving of nearly 40% for FTP-75 driving cycle and 13% for the class cycle.},
year = {2025}
}
Copy
|
Download
-
TY - JOUR
T1 - Adaptive ECMS for Hybrid Electric Vehicles Based on SOC Feedback
AU - Yahouza Chaibou Chapi
AU - Noma Talibi Soumaïla
AU - Attoumane Kosso Mamadou Moustapha
AU - Insa Issoufou Moussa
AU - Boureima Seibou
Y1 - 2025/07/30
PY - 2025
N1 - https://doi.org/10.11648/j.ajee.20251303.13
DO - 10.11648/j.ajee.20251303.13
T2 - American Journal of Energy Engineering
JF - American Journal of Energy Engineering
JO - American Journal of Energy Engineering
SP - 118
EP - 132
PB - Science Publishing Group
SN - 2329-163X
UR - https://doi.org/10.11648/j.ajee.20251303.13
AB - The negative impact of atmospheric pollutants emitted by mobile vehicles on human health and environment have been increasingly attracting the attention of public and private policy makers. Those entities and many other have been working together to ensure that emissions related to the consumption of fossil fuels are considerably minimize. One of the main authors of this problem seems to be the means of displacement we are using every day, thermal cars. It is therefore necessary to explore and develop more economical approaches and modern alternatives for vehicle energy consumption. It is within this framework that automobile manufacturers, in collaboration with researchers, are committed to developing new forms of transport, the most ideal of which are electric vehicles and hybrid electric vehicles. This paper discusses the modeling and optimization of energy management of hybrid electric vehicles. The article develops an energy management system to minimize the energy consumption of a hybrid electric vehicle. Hybrid electric vehicle control is managed by the Adaptive Equivalent Consumption Minimization Strategy (A_ECMS). This strategy performs an update of the equivalence factor through the battery state of charge feedback method. The simulation results shown that the A_ECMS approach achieved an average fuel saving of nearly 40% for FTP-75 driving cycle and 13% for the class cycle.
VL - 13
IS - 3
ER -
Copy
|
Download